
What to Know About Oceanic Engineering and the Marine Robots They Work With
March 22, 2021

Oceanic engineers are researching and using technology to explore our ocean water in ways we have never been capable of in the past. In honor of World Water Day on March 22, we connected with IEEE member Bharath Kalyan, also a member of the IEEE Oceanic Engineering Society, to learn more about oceanic engineering and how marine robots, such as autonomous underwater vehicles (AUVS) and remotely operated vehicles (ROVs), are being utilized to explore Earth’s bodies of water.
IEEE: What is something you find very interesting about your line of work?
Bharath Kalyan: I’m an oceanic engineer working on using marine robots to better understand our oceans. As we all know, about 70% of Earth’s surface is covered with water, and over 95% of the water is in our oceans. Although the ocean plays a critical role in everything from the air we breathe to daily weather and climate patterns, we know very little about it.
Furthermore, as the world increasingly turns to electrification to decarbonize, the demand for offshore renewable energy sources and offshore minerals has skyrocketed. With significant advances in underwater vehicular technology, sensing, communication and networking, it is possible to sense and observe the complex processes that drive the ocean environment and really understand our oceans.
IEEE: What do you wish more people knew about oceanic engineering?
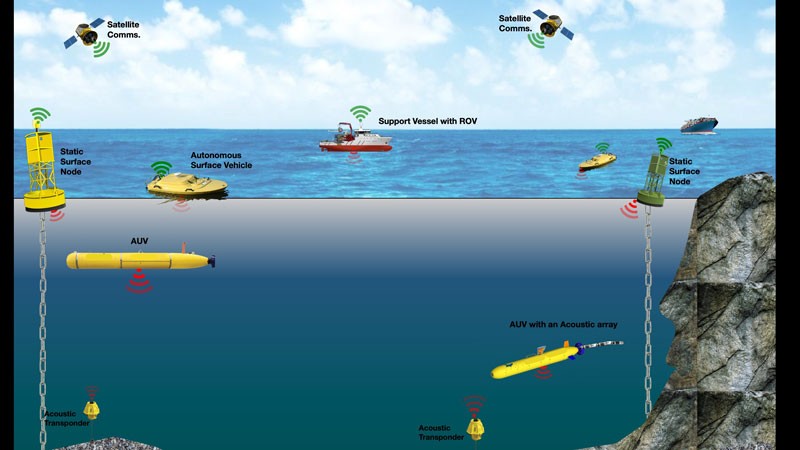
BK: The term “marine robotics” is generally used to describe unmanned systems operating in marine environments, both surface and subsea.
ROVs, a class of tethered subsea systems, have established themselves as indispensable for offshore operations primarily for asset integrity management (e.g., offshore oil rigs, offshore windmills, floating solar platforms etc.).
AUVs, a class of free-swimming subsea vehicles, have become a recognized tool for seafloor mapping surveys (e.g., large-scale coral survey and reef management, deep-sea mineral surveys, etc.), and mine countermeasure operations for the navies worldwide.
IEEE: Can you explain the autonomy of underwater vehicles further?
BK: The autonomy of subsea underwater vehicles is dependent on the ability to navigate successfully within an environment without a need for human intervention. Navigation is a process of addressing 3 fundamental questions:
1. Where am I? (Localization)
2. Where am I going? (Mission Objective)
3. How do I get there? (Collision Avoidance and Path Planning)
Positioning (localization) is an important requirement for any type of mobile robot, but this is especially true for subsea vehicles as safe operations and recovery hinge on it.
Furthermore, for data gathered by a subsea underwater vehicle to be of any value, precise positioning information is essential. Unfortunately, the most commonly used positioning tool used by land and aerial vehicles, the global positioning system (GPS), does not work in subsea vehicles due to the strong attenuation of electromagnetic signals underwater.
Hence positioning of underwater vehicles is achieved through a combination of proprioceptive (internal: e.g., inertial measurement units, compass) sensing and exteroceptive (external: e.g., pressure sensor, acoustic navigation, bathymetric sonar, optical camera) sensing techniques.
IEEE: Specifically related to your own research, what are the main takeaways that you would like to share?
BK: During the past three decades the pace of subsea vehicles, more specifically AUV development, has increased substantially. A number of recent efforts have been undertaken globally to apply these technological developments into various application domain areas.
The industry partners and government agencies are playing an active role in deploying these vehicles for a variety of applications ranging from fisheries, coastal habitat management, environmental mapping, maritime surveillance and mine countermeasures to deep sea mineral exploration.
As evidenced by the increasing participation of the industry and academic community in IEEE/MTS OCEANS and IEEE AUV Symposia and Singapore AUV Challenge (SAUVC), there is a tremendous and growing global interest in sub-sea technology in general, and AUV technology in particular. The IEEE/MTS Global OCEANS 2020 virtual event included two special panels on autonomous systems that were extremely well received.
The next IEEE AUV symposium is planned to be held in Singapore in the third quarter of 2022 and we look forward to meeting researchers from the marine robotics community.




 The Impact of Tech in 2026
The Impact of Tech in 2026 Meaningful Momentum or Running in Place?
Meaningful Momentum or Running in Place? AI Through Our Ages
AI Through Our Ages Liquid Infrastructure: Our Planet's Most Precious Resource
Liquid Infrastructure: Our Planet's Most Precious Resource The Impact of Technology in 2025
The Impact of Technology in 2025 Quantum and AI: Safeguards or Threats to Cybersecurity?
Quantum and AI: Safeguards or Threats to Cybersecurity? Why AI Can't Live Without Us
Why AI Can't Live Without Us Bits, Bytes, Buildings and Bridges: Digital-Driven Infrastructure
Bits, Bytes, Buildings and Bridges: Digital-Driven Infrastructure Impact of Technology in 2024
Impact of Technology in 2024 Emerging AI Cybersecurity Challenges and Solutions
Emerging AI Cybersecurity Challenges and Solutions The Skies are Unlimited
The Skies are Unlimited Smart Cities 2030: How Tech is Reshaping Urbanscapes
Smart Cities 2030: How Tech is Reshaping Urbanscapes Impact of Technology 2023
Impact of Technology 2023 Cybersecurity for Life-Changing Innovations
Cybersecurity for Life-Changing Innovations Smarter Wearables Healthier Life
Smarter Wearables Healthier Life Infrastructure In Motion
Infrastructure In Motion The Impact of Tech in 2022 and Beyond
The Impact of Tech in 2022 and Beyond Cybersecurity, Technology and Protecting Our World
Cybersecurity, Technology and Protecting Our World How Technology Helps us Understand Our Health and Wellness
How Technology Helps us Understand Our Health and Wellness The Resilience of Humanity
The Resilience of Humanity Harnessing and Sustaining our Natural Resources
Harnessing and Sustaining our Natural Resources Creating Healthy Spaces Through Technology
Creating Healthy Spaces Through Technology Exceptional Infrastructure Challenges, Technology and Humanity
Exceptional Infrastructure Challenges, Technology and Humanity The Global Impact of IEEE's 802 Standards
The Global Impact of IEEE's 802 Standards Scenes of our Cyber Lives: The Security Threats and Technology Solutions Protecting Us
Scenes of our Cyber Lives: The Security Threats and Technology Solutions Protecting Us How Millennial Parents are Embracing Health and Wellness Technologies for Their Generation Alpha Kids
How Millennial Parents are Embracing Health and Wellness Technologies for Their Generation Alpha Kids Space Exploration, Technology and Our Lives
Space Exploration, Technology and Our Lives Global Innovation and the Environment
Global Innovation and the Environment How Technology, Privacy and Security are Changing Each Other (And Us)
How Technology, Privacy and Security are Changing Each Other (And Us) Find us in booth 31506, LVCC South Hall 3 and experience the Technology Moon Walk
Find us in booth 31506, LVCC South Hall 3 and experience the Technology Moon Walk Virtual and Mixed Reality
Virtual and Mixed Reality How Robots are Improving our Health
How Robots are Improving our Health IEEE Experts and the Robots They are Teaching
IEEE Experts and the Robots They are Teaching See how millennial parents around the world see AI impacting the lives of their tech-infused offspring
See how millennial parents around the world see AI impacting the lives of their tech-infused offspring Take the journey from farm to table and learn how IoT will help us reach the rising demand for food production
Take the journey from farm to table and learn how IoT will help us reach the rising demand for food production Watch technical experts discuss the latest cyber threats
Watch technical experts discuss the latest cyber threats Explore how researchers, teachers, explorers, healthcare and medical professionals use immersive technologies
Explore how researchers, teachers, explorers, healthcare and medical professionals use immersive technologies Follow the timeline to see how Generation AI will be impacted by technology
Follow the timeline to see how Generation AI will be impacted by technology Learn how your IoT data can be used by experiencing a day in a connected life
Learn how your IoT data can be used by experiencing a day in a connected life Listen to technical experts discuss the biggest security threats today
Listen to technical experts discuss the biggest security threats today See how tech has influenced and evolved with the Games
See how tech has influenced and evolved with the Games Enter our virtual home to explore the IoT (Internet of Things) technologies
Enter our virtual home to explore the IoT (Internet of Things) technologies Explore an interactive map showcasing exciting innovations in robotics
Explore an interactive map showcasing exciting innovations in robotics Interactively explore A.I. in recent Hollywood movies
Interactively explore A.I. in recent Hollywood movies Get immersed in technologies that will improve patients' lives
Get immersed in technologies that will improve patients' lives