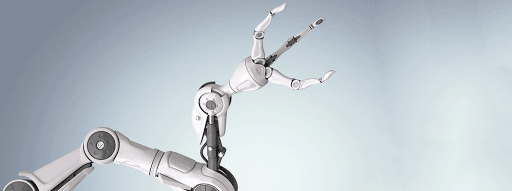
Teaching Robots to Catch Objects
August 30, 2017
Robots are learning to do many tasks for humans, but one task that is difficult for them to learn is how to catch an object. While we don’t think about everything that occurs in that one second when a fast-flying object is tossed to us, there are many things that a robot would have to learn to successfully catch it.
To be able to teach robots how to catch an object in-flight, the following three problems need solutions:
- An accurate prediction of the trajectory of the object, depending on the object’s shape
- Prediction of the optimal interception point
- Fast and precise planning of the robot’s arm to move at the correct moment to catch the object
While robots can be constructed with sensors, an arbitrary motion, like catching an object is very hard to sense. The estimation of the object’s flight and the location where it will land have to be calculated in a split second.
Researchers have developed a framework to teach this action to robots using rigid, uneven mass distributions and non-rigid mass distributions. Robots are taught either through observing humans or through exploration. Using modules to estimate the trajectory of the flying objects, determine the final catching configuration, and for the correct arm and finger motions, robots were able to learn how to catch.
For More Information
We address the difficult problem of catching in-flight objects with uneven shapes. This requires the solution of three complex [...]




 Liquid Infrastructure: Our Planet's Most Precious Resource
Liquid Infrastructure: Our Planet's Most Precious Resource The Impact of Technology in 2025
The Impact of Technology in 2025 Quantum and AI: Safeguards or Threats to Cybersecurity?
Quantum and AI: Safeguards or Threats to Cybersecurity? Why AI Can't Live Without Us
Why AI Can't Live Without Us Bits, Bytes, Buildings and Bridges: Digital-Driven Infrastructure
Bits, Bytes, Buildings and Bridges: Digital-Driven Infrastructure Impact of Technology in 2024
Impact of Technology in 2024 Emerging AI Cybersecurity Challenges and Solutions
Emerging AI Cybersecurity Challenges and Solutions The Skies are Unlimited
The Skies are Unlimited Smart Cities 2030: How Tech is Reshaping Urbanscapes
Smart Cities 2030: How Tech is Reshaping Urbanscapes Impact of Technology 2023
Impact of Technology 2023 Cybersecurity for Life-Changing Innovations
Cybersecurity for Life-Changing Innovations Smarter Wearables Healthier Life
Smarter Wearables Healthier Life Infrastructure In Motion
Infrastructure In Motion The Impact of Tech in 2022 and Beyond
The Impact of Tech in 2022 and Beyond Cybersecurity, Technology and Protecting Our World
Cybersecurity, Technology and Protecting Our World How Technology Helps us Understand Our Health and Wellness
How Technology Helps us Understand Our Health and Wellness The Resilience of Humanity
The Resilience of Humanity Harnessing and Sustaining our Natural Resources
Harnessing and Sustaining our Natural Resources Creating Healthy Spaces Through Technology
Creating Healthy Spaces Through Technology Exceptional Infrastructure Challenges, Technology and Humanity
Exceptional Infrastructure Challenges, Technology and Humanity The Global Impact of IEEE's 802 Standards
The Global Impact of IEEE's 802 Standards Scenes of our Cyber Lives: The Security Threats and Technology Solutions Protecting Us
Scenes of our Cyber Lives: The Security Threats and Technology Solutions Protecting Us How Millennial Parents are Embracing Health and Wellness Technologies for Their Generation Alpha Kids
How Millennial Parents are Embracing Health and Wellness Technologies for Their Generation Alpha Kids Space Exploration, Technology and Our Lives
Space Exploration, Technology and Our Lives Global Innovation and the Environment
Global Innovation and the Environment How Technology, Privacy and Security are Changing Each Other (And Us)
How Technology, Privacy and Security are Changing Each Other (And Us) Find us in booth 31506, LVCC South Hall 3 and experience the Technology Moon Walk
Find us in booth 31506, LVCC South Hall 3 and experience the Technology Moon Walk Virtual and Mixed Reality
Virtual and Mixed Reality How Robots are Improving our Health
How Robots are Improving our Health IEEE Experts and the Robots They are Teaching
IEEE Experts and the Robots They are Teaching See how millennial parents around the world see AI impacting the lives of their tech-infused offspring
See how millennial parents around the world see AI impacting the lives of their tech-infused offspring Take the journey from farm to table and learn how IoT will help us reach the rising demand for food production
Take the journey from farm to table and learn how IoT will help us reach the rising demand for food production Watch technical experts discuss the latest cyber threats
Watch technical experts discuss the latest cyber threats Explore how researchers, teachers, explorers, healthcare and medical professionals use immersive technologies
Explore how researchers, teachers, explorers, healthcare and medical professionals use immersive technologies Follow the timeline to see how Generation AI will be impacted by technology
Follow the timeline to see how Generation AI will be impacted by technology Learn how your IoT data can be used by experiencing a day in a connected life
Learn how your IoT data can be used by experiencing a day in a connected life Listen to technical experts discuss the biggest security threats today
Listen to technical experts discuss the biggest security threats today See how tech has influenced and evolved with the Games
See how tech has influenced and evolved with the Games Enter our virtual home to explore the IoT (Internet of Things) technologies
Enter our virtual home to explore the IoT (Internet of Things) technologies Explore an interactive map showcasing exciting innovations in robotics
Explore an interactive map showcasing exciting innovations in robotics Interactively explore A.I. in recent Hollywood movies
Interactively explore A.I. in recent Hollywood movies Get immersed in technologies that will improve patients' lives
Get immersed in technologies that will improve patients' lives