Would You Cheer for a Robot?
November 25, 2025
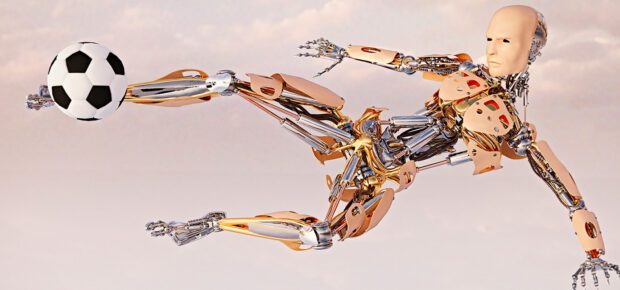
When we think of robots, we tend to think of machines performing routine, repetitive work. Robots, however, also have entertainment potential, like when they play soccer in the RoboCup.
As a roboticist in the field of human-robot interaction, the interaction between a crowd of humans and a team of robots playing soccer poses interesting questions: What if robots could energize a crowd, spark emotional reactions and bring people together like athletes on a field?
Those questions sit at the core of a new idea for understanding how humanoid robots engage with human audiences in dynamic, public settings: the Robot-Crowd Interaction Framework or R-CIF.
But this is about more than robot soccer. As robots move beyond the lab into stadiums, hospitals and public venues, designing for emotional connection and collective experience becomes as vital as mechanical precision.
Beyond Measuring the Machine Itself
If you want to see how robots affect crowd behavior, watch a match from the RoboCup Soccer Standard Platform League. It’s a robot soccer match where all of the teams compete using the same robot model. You’ll see humanoid robots competing and responding to a complex environment and executing autonomous strategies.
But beyond the engineering marvel is the emotional involvement of the audience. It is fascinating. People cheer. They take sides. They experience disappointment.
The robots evoke something profoundly human. It’s not just about robots playing soccer.
As a conceptual framework that defines the roles and dynamics between robots, referees and spectators, R-CIF unpacks this phenomenon.
- Identify emotional triggers in robot behavior that drive public engagement
- Map patterns of crowd response in competitive or high-stakes environments
- Bridge the gap between technical robot design and human social experience
Robotics research has already developed several tools to evaluate the performance of robots. RoboCup robots can be evaluated using established tools such as the Autonomy Levels for Unmanned Systems (ALFUS). It focuses on mission complexity, environmental complexity and external system independence. The Autonomy and Technology Readiness Assessment (ATRA) tracks the growth of robot capabilities over time.
But the most exciting contribution is connecting these assessments to real-world crowd interactions. It’s a new way of evaluating robots.
Why This Matters: A New Era of Social Robots
Recently, my co-authors and I presented the interaction framework at the 20th ACM/IEEE International Conference on Human-Robot Interaction (HRI’25) in Melbourne. Instead of opening our presentation with a series of slides that listed our credentials, we demonstrated R-CIF in action.
We opened with a video of a RoboCup match. It transformed the room. Within seconds, people were cheering for their team, red or blue, and reacting to goals as if they were watching a real football match.
The response was overwhelming,
But all of this raises the question. Why does this matter?
There’s an evolution in the field of robotics. Human-robot interaction has evolved to add new specialties, like human-robot collaboration and human-robot teaming, where robots are not just tools or collaborators, but teammates. As robots move out of confined labs and into human‑centred environments, from concerts and classrooms to airports and arenas, designing for performance alone is no longer enough. We must also design for presence, inclusion and shared experience. The R‑CIF offers a pathway to understand and engineer those key moments when robots become part of a crowd, not just acting among people, but acting with them, as teammates in a shared emotional and social space.
As robotics continues to evolve, frameworks like R-CIF will help guide development toward systems that are not only functional but also socially fluent. The game is changing and the crowd is watching.
ABOUT OUR AUTHOR
Filippo Sanfilippo is an IEEE Senior Member whose work focuses on robotics and machine learning. He is a member of the IEEE Public Visibility Committee and a former chair of IEEE Norway Section.




 Meaningful Momentum or Running in Place?
Meaningful Momentum or Running in Place? AI Through Our Ages
AI Through Our Ages Liquid Infrastructure: Our Planet's Most Precious Resource
Liquid Infrastructure: Our Planet's Most Precious Resource The Impact of Technology in 2025
The Impact of Technology in 2025 Quantum and AI: Safeguards or Threats to Cybersecurity?
Quantum and AI: Safeguards or Threats to Cybersecurity? Why AI Can't Live Without Us
Why AI Can't Live Without Us Bits, Bytes, Buildings and Bridges: Digital-Driven Infrastructure
Bits, Bytes, Buildings and Bridges: Digital-Driven Infrastructure Impact of Technology in 2024
Impact of Technology in 2024 Emerging AI Cybersecurity Challenges and Solutions
Emerging AI Cybersecurity Challenges and Solutions The Skies are Unlimited
The Skies are Unlimited Smart Cities 2030: How Tech is Reshaping Urbanscapes
Smart Cities 2030: How Tech is Reshaping Urbanscapes Impact of Technology 2023
Impact of Technology 2023 Cybersecurity for Life-Changing Innovations
Cybersecurity for Life-Changing Innovations Smarter Wearables Healthier Life
Smarter Wearables Healthier Life Infrastructure In Motion
Infrastructure In Motion The Impact of Tech in 2022 and Beyond
The Impact of Tech in 2022 and Beyond Cybersecurity, Technology and Protecting Our World
Cybersecurity, Technology and Protecting Our World How Technology Helps us Understand Our Health and Wellness
How Technology Helps us Understand Our Health and Wellness The Resilience of Humanity
The Resilience of Humanity Harnessing and Sustaining our Natural Resources
Harnessing and Sustaining our Natural Resources Creating Healthy Spaces Through Technology
Creating Healthy Spaces Through Technology Exceptional Infrastructure Challenges, Technology and Humanity
Exceptional Infrastructure Challenges, Technology and Humanity The Global Impact of IEEE's 802 Standards
The Global Impact of IEEE's 802 Standards Scenes of our Cyber Lives: The Security Threats and Technology Solutions Protecting Us
Scenes of our Cyber Lives: The Security Threats and Technology Solutions Protecting Us How Millennial Parents are Embracing Health and Wellness Technologies for Their Generation Alpha Kids
How Millennial Parents are Embracing Health and Wellness Technologies for Their Generation Alpha Kids Space Exploration, Technology and Our Lives
Space Exploration, Technology and Our Lives Global Innovation and the Environment
Global Innovation and the Environment How Technology, Privacy and Security are Changing Each Other (And Us)
How Technology, Privacy and Security are Changing Each Other (And Us) Find us in booth 31506, LVCC South Hall 3 and experience the Technology Moon Walk
Find us in booth 31506, LVCC South Hall 3 and experience the Technology Moon Walk Virtual and Mixed Reality
Virtual and Mixed Reality How Robots are Improving our Health
How Robots are Improving our Health IEEE Experts and the Robots They are Teaching
IEEE Experts and the Robots They are Teaching See how millennial parents around the world see AI impacting the lives of their tech-infused offspring
See how millennial parents around the world see AI impacting the lives of their tech-infused offspring Take the journey from farm to table and learn how IoT will help us reach the rising demand for food production
Take the journey from farm to table and learn how IoT will help us reach the rising demand for food production Watch technical experts discuss the latest cyber threats
Watch technical experts discuss the latest cyber threats Explore how researchers, teachers, explorers, healthcare and medical professionals use immersive technologies
Explore how researchers, teachers, explorers, healthcare and medical professionals use immersive technologies Follow the timeline to see how Generation AI will be impacted by technology
Follow the timeline to see how Generation AI will be impacted by technology Learn how your IoT data can be used by experiencing a day in a connected life
Learn how your IoT data can be used by experiencing a day in a connected life Listen to technical experts discuss the biggest security threats today
Listen to technical experts discuss the biggest security threats today See how tech has influenced and evolved with the Games
See how tech has influenced and evolved with the Games Enter our virtual home to explore the IoT (Internet of Things) technologies
Enter our virtual home to explore the IoT (Internet of Things) technologies Explore an interactive map showcasing exciting innovations in robotics
Explore an interactive map showcasing exciting innovations in robotics Interactively explore A.I. in recent Hollywood movies
Interactively explore A.I. in recent Hollywood movies Get immersed in technologies that will improve patients' lives
Get immersed in technologies that will improve patients' lives